Iniciar sesión
Carrito (0)
Bienvenido
Electrónica
Ver todos Electrónica SoldaduraSoldadura
Ver todos Soldadura Estaciones de soldadura, desoldadura y aire... Soldador de estaño Accesorios para soldaduraAccesorios para soldadura
Ver todos Accesorios para soldadura Puntas para soldador de estaño Estaño Flux, pasta y sprays Repuestos para soldaduraFusibles y accesorios
Ver todos Fusibles y accesorios FusiblesFusibles
Ver todos Fusibles Fusibles de 5 x 20mmFusibles de 5 x 20mm
Ver todos Fusibles de 5 x 20mm Fusibles rápidos de 5 x 20mm Fusibles lentos de 5 x 20mmFusibles de 6.35 x 32mm
Ver todos Fusibles de 6.35 x 32mm Fusibles rápidos de 6.35 x 32mm Fusibles lentos de 6.35 x 32mmInterruptores y conmutadores
Ver todos Interruptores y conmutadores Interruptores Basculantes Pulsadores Interruptores Conmutadores deslizantes Microrruptores Interruptores de llaveElectrónica Educativa
Ver todos Electrónica Educativa Cursos, libros y revistasCursos, libros y revistas
Ver todos Cursos, libros y revistas Revistas Curso de electrónica Libros Software electrónicaArduino
Ver todos Arduino Placas Compatibles Placas Originales Kits Arduino Módulos Accesorios para Arduino ShieldsHerramientas de Electrónica
Ver todos Herramientas de Electrónica Lupas para electronica Alicates Pinzas DestornilladoresDestornilladores
Ver todos Destornilladores Destornilladores Planos Destornilladores Torx Destornilladores Philips Destornilladores hexagonales Destornilladores de precisión Destornilladores Varios Juegos de destornilladoresInstrumentos de panel
Ver todos Instrumentos de panel Instrumentos de panel AnalógicosInstrumentos de panel Analógicos
Ver todos Instrumentos de panel Analógicos De corriente DC De tensiónEnergía
Ver todos Energía Fuentes de alimentaciónFuentes de alimentación
Ver todos Fuentes de alimentación Fuentes de alimentación de laboratorio Alimentadores y cargadores Alimentación conmutada No estabilizada Conectores y bases Conectores, cables y alimentadores de mecheroComponentes electrónicos
Ver todos Componentes electrónicos Circuitos integrados Ferrita para cables Láser industrial Reguladores de tensión Puentes rectificadores Mosfet de potencia Varistores Termistores NTC Módulos transmisor-receptor (AUREL)Módulos transmisor-receptor (AUREL)
Ver todos Módulos transmisor-receptor (AUREL) Receptores Transmisores portátiles Transmisores híbridos AntenasCondensadores
Ver todos Condensadores Condensadores Electroliticos Condensadores Ceramicos Condensadores MKT Condensadores de Tantalo Condensadores de poliéster Juegos de condensadores Condensadores de arranqueResistencias eléctricas
Ver todos Resistencias eléctricas Resistencias de capa de carbónResistencias de capa de carbón
Ver todos Resistencias de capa de carbón Resistencias 1/4W (SERIE RA) Resistencias 1W (SERIE RC)Resistencias bobinadas
Ver todos Resistencias bobinadas Resistencias 5W (SERIE RE) Resistencias 10W (SERIE RF)Cables y Conectores
Ver todos Cables y Conectores ConectoresConectores
Ver todos Conectores Conectores N Pinzas de cocodrilo CONECTORES DE ORDENADORCONECTORES DE ORDENADOR
Ver todos CONECTORES DE ORDENADOR CONECTORES SUB-D CAJAS PARA SUB-D CONECTORES SUB-D ALTA DENSIDAD, PARA CI CONECTORES USB CONECTORES SUB-D PARA CABLE PLANO CONECTORES TARJETA INTELIGENTEAccesorios para cables
Ver todos Accesorios para cables CADENETAS - BLÍSTER Tubos termorretráctiles PASAHILOS PASACABLESInstrumentos de medida
Ver todos Instrumentos de medida Electricidad y electrónicaElectricidad y electrónica
Ver todos Electricidad y electrónica Multímetros Pinzas amperimétricas Osciloscopios Generador de funciones Comprobadores de tensión Comprobadores de cable LAN Instrumentos para REBTAmbiental e industria
Ver todos Ambiental e industria Medidores de humedad Caudalímetros Durómetros Brillometros Balanzas para laboratorio e industria PH-Metros Medidores de CO2 Anemómetros Instrumentos especiales Tacómetros Termómetros Luxómetros Sonómetros EspesímetrosComprobadores y analizadores
Ver todos Comprobadores y analizadores Comprobadores y certificadores de redes LAN Instrumentos para conexionado y verificación de... Verificadores de Instalaciones eléctricasCámaras de vigilancia y seguridad CCTV
Ver todos Cámaras de vigilancia y seguridad CCTV Cámaras de vigilancia IPCámaras de vigilancia IP
Ver todos Cámaras de vigilancia IP Cámaras IP consumo Cámaras IP Bullet Cámaras IP Domo Cámaras IP Motorizadas Cámaras inalámbricas Wifi Mini cámaras IP Cámaras de vigilancia térmicasNVR - Videograbadores IP
Ver todos NVR - Videograbadores IP NVR 4 Cámaras NVR 8 Cámaras NVR 16 Cámaras NVR 32 CámarasKits Cámaras IP
Ver todos Kits Cámaras IP Kits 2 Cámaras IP Kits 4 Cámaras IP Kits 8 Cámaras IP Kits 16 Cámaras IPCámaras de seguridad Y vigilancia
Ver todos Cámaras de seguridad Y vigilancia Cámaras Bullet Cámaras Domo Cámaras Motorizadas Mini cámaras ocultas Mini cámaras CCTVVideograbadores Cámaras CCTV
Ver todos Videograbadores Cámaras CCTV DVR 4 Canales DVR 8 Canales DVR 16 Canales DVR 32 CanalesKits de cámaras de Seguridad
Ver todos Kits de cámaras de Seguridad kits de 2 Cámaras kits de 4 cámaras kits de 8 Cámaras kits de 16 CámarasAccesorios cámaras de seguridad
Ver todos Accesorios cámaras de seguridad Alimentación Accesorios IP Cajas fuertes Teclados de control PTZ Soportes para monitor Monitores Carcasas para cámaras de vigilancia Cajas de Conexiones Soportes Herramientas Carteles Distribuidores de vídeo Focos infrarrojos Vídeo por UTP Micrófonos Discos duros Conectores Cable para cámaras de vigilancia Cámaras FalsasCámaras Dahua
Ver todos Cámaras Dahua Cámaras IP Dahua Camaras Wifi Dahua Camaras Motorizadas Dahua Grabador Dahua Camaras Bullet Dahua Camaras Domo Dahua Videoporteros DahuaCámaras Hikvision
Ver todos Cámaras Hikvision Cámaras IP Hikvision Cámaras Domo Hikvision Grabador Hikvision Cámara Bullet HikvisionCámaras Safire
Ver todos Cámaras Safire Cámaras IP Safire Cámaras Motorizadas Safire Cámaras Bullet Safire Cámara Domo Safire Grabadores Safire Videoporteros SafireAlarma Ajax
Ver todos Alarma Ajax Kits alarma Ajax Centrales Ajax Detectores Ajax Mandos y teclados Ajax Sirenas Ajax Accesorios Ajax Cámaras de vigilancia Ajax Detectores riesgo hogar Ajax Ajax Domótica Soportes de repuesto AjaxAlarmas y seguridad
Ver todos Alarmas y seguridad Alarma ParadoxAlarma Paradox
Ver todos Alarma Paradox Kits alarma Paradox Control de Accesos Paradox Sirenas Paradox Expansores y repetición Módulos de Comunicación Cajas y baterías Teclados y Mandos Detectores inalámbricos Detectores Cableados Centrales Paradox Soportes y accesoriosOtras marcas
Ver todos Otras marcas Alarma PowerMax Pro Alarma Powermaster Alarma Chuango G6 X-AlarmSistemas Cableados
Ver todos Sistemas Cableados Detectores volumétricos Contactos Magnéticos Barreras de infrarrojos Sirenas Cableadas Soportes para detectoresSistemas de seguridad
Ver todos Sistemas de seguridad Cerraduras invisibles Detectores Riesgo Hogar Timbres y Alarmas económicas Detectores PIR con ReleControl de Accesos
Ver todos Control de Accesos Control de acceso para puertas Control de presencia Teclados autónomos Tornos de acceso Accesorios para control de accesos Control de Rondas para VigilantesControl de Rondas para Vigilantes
Ver todos Control de Rondas para Vigilantes Control de Rondas Accesorios para control de rondasControl remoto con tarjeta SIM
Ver todos Control remoto con tarjeta SIM Control remoto GSM Accesorios para control GSMVideoporteros y Timbres
Ver todos Videoporteros y Timbres Kits Videoporteros Monitores para videoporteros Accesorios para videporteros PlacasMandos de garaje
Ver todos Mandos de garaje Mandos de garaje originalesMandos de garaje originales
Ver todos Mandos de garaje originales DEA MOOVO y MHOUSE PROGET ERONE BENINCA GENIUS ROLLTORE PRASTEL CLEMSA Sabutom - New Gate ALLMATIC NORMSTAHL AVIDSEN EXTEL ACM MOTORLINE FORSA NORTON DOORMATIC SEA LIFE NOVOFERM MARANTEC CELINSA BFT PUJOL NICE APRIMATIC ERREKA FAAC SMINN ELEMAT SEAV SOMMER DITEC GIBIDI TELCOMA V2 Electronica CAME ROPERMandos compatibles
Ver todos Mandos compatibles Mandos Autocopy Carcasas Mandos de tabaco Aire acondicionado Mandos de TelevisiónEspionaje y contraespionaje
Ver todos Espionaje y contraespionaje Cámaras espíaCámaras espía
Ver todos Cámaras espía Mini Cámaras Espía Objetos con cámara espía Cámaras espía WiFi IPMicrófonos espía ocultos
Ver todos Micrófonos espía ocultos Grabadoras voz espía Micrófonos espía GSM Micrófonos de pared Micrófono espía unidireccionalContraespionaje Detectores
Ver todos Contraespionaje Detectores Detectores de cámaras y micrófonos espía Detectores No Lineales Anulador de micrófonosLocalizadores GPS espía
Ver todos Localizadores GPS espía Localizadores GPS lapa Localizadores VehículosTermografía
Ver todos Termografía Cámaras termográficas Monoculares térmicos Binoculares térmicos Accesorios térmicos Monoculares nocturnos Cámaras para medir temperatura corporalKits y Módulos
Ver todos Kits y Módulos Kits y Módulos VariosKits y Módulos Varios
Ver todos Kits y Módulos Varios Revistas Todoelectronica Resistor Nueva Electrónica ValKit CanaKit-AdoKit GPE Sales Kit Future Kit MaxxTronic Smart Kit VariosVelleman
Ver todos Velleman KitsKits
Ver todos Kits Control a Distancia - Domótica Aplicaciones Domésticas Audio / HiFi Alarma y coche Efectos de luz y domótica Alimentaciones y cargadoresFutura Elettronica
Ver todos Futura Elettronica Módulos para Control de AccesosMódulos para Control de Accesos
Ver todos Módulos para Control de Accesos tarjetas magnéticas Sistemas de tarjeta chip Sistemas de transpondedorAutomatización e interfaz PC
Ver todos Automatización e interfaz PC Interfaz PC Sistemas de luces Tarjetas de expansión Unidades y sensores de tiempoProcesamiento audio/video
Ver todos Procesamiento audio/video Procesamiento audio Elaboración/gestión de videoConectividad y Networking
Ver todos Conectividad y Networking INTERFAZ ETHERNET TIBBOINTERFAZ ETHERNET TIBBO
Ver todos INTERFAZ ETHERNET TIBBO Accesorios Controladores Módulos Ethernet Kit de inicioMódulos de radio
Ver todos Módulos de radio Antenas RF Sistemas multicanal Radiocontrol punto a punto Codificadores rolling código AM y FM Transmisores RadiofrecuenciaTransmisores Radiofrecuencia
Ver todos Transmisores Radiofrecuencia Transmisores doble frecuencia 434/868 MHz Transmisores RF 433 MHz 868 MHz Audio VideoMandos a distancia y receptores
Ver todos Mandos a distancia y receptores Mandos a distancia Receptores CompletosReceptores RF
Ver todos Receptores RF Receptor RF 433 MHz Receptor RF 868 MHz Receptores con DecodificaciónCebek
Ver todos Cebek Fuentes de alimentación y reguladores Componentes Cebek Educativos Domotica Convertidores Contadores Automatismos Termostatos Temporizadores electronicos Control a distancia Síntesis de voz Display LCD Reguladores de luz SonidoKemo
Ver todos Kemo Ahuyentadores de Animales Cajas protectoras Cajas y carcasas KEMO Radio y contraespionaje Componentes Kemo Kits Transformadores, dimmers, reguladores Motores Interface Módulos Hogar: economizadores, descalcificadores fuente de alimentación, interruptor, regulador... Iluminacion y sonido EducativoOzonizadores
Ver todos Ozonizadores Ozonizadores multiusos Ozonizadores portátiles Ozonizadores domésticos Ozonizadores para vehículos Accesorios y repuestos para ozonizadorAccesorios y repuestos para ozonizador
Ver todos Accesorios y repuestos para ozonizador Lámparas ozono Transformadores ozono Placas cerámicas ozonoDetectores de metales y oro
Ver todos Detectores de metales y oro Detectores de oro Detectores de agua Detectores de Diamantes y Gemas Georadar Detectores de fugas de agua Varios y Accesorios Detectores GER DETECT Detectores OKMOportunidades
Ver todos Oportunidades TV satélite y TDTTV satélite y TDT
Ver todos TV satélite y TDT Decodificadores de satélite Antenas SAT y LNB Medidores y satfinder Distribuidores y derivadores Tomas y conectores Herrajes y soportes para antenas Cableado Amplificación TDT Amplificación Satélite Antenas TDTConsolas PS3, NDS, Wii, Xbox
Ver todos Consolas PS3, NDS, Wii, Xbox Nintendo DS Nintendo Wii PSP PlayStation 3 (PS3) PlayStation 3 Slim PlayStation 2 (PS2) XBOX (FAT) Xbox 360 iPhoneElectrificadores de vallas / cercas
Ver todos Electrificadores de vallas / cercas Recargables a 230 o 110 V Directos a 230 o 110 V Con pilas Baterías de 12 V Energía solarOrdenadores, Consolas
Ver todos Ordenadores, Consolas Multimedia Accesorios Multimedia Cables y Conectores para placas y PC Fuentes y Cargadores PC VariosOcio y tiempo libre
Ver todos Ocio y tiempo libre Linternas y Lámparas Juegos Educativos Aeromodelismo Salud Radio y Comunicaciones Coche HogarMaterial Eléctrico
Ver todos Material Eléctrico Regletas Mecanismos de Superficie- Timbres Interruptores Automáticos Convertidores, reguladores, temporizadores... Alimentadores Adaptadores de viajeAudio
Ver todos Audio Altavoces Accesorios Audio Audio y video Amplificadores Conectores y Adaptadores de Audio Cable JackSeguridad
Ver todos Seguridad Seguridad infantil Alarmas Seguridad Personal Detectores movimiento Detectores billetesIluminación
Ver todos Iluminación Portalámparas Mini bombillas Bombillas Bajo consumo Bombillas Halógenas Bombillas Fluorescentes Focos Halógenos Bombillas LedIluminación Festiva
Ver todos Iluminación Festiva Iluminación Disco Luz negra Luminiscencia Manguera luminosa Espejos DecorativaEnergías renovables
Ver todos Energías renovables Educativo Paneles solares Bombeo y riego Solar Extractores solares Termostatos y programadoresRobótica
Ver todos Robótica Robots Raspberry Pi Aleaciones Impresión 3D Sensores Motores Accesorios y componentesAccesorios y componentes
Ver todos Accesorios y componentes ACCESORIOS MECÁNICOS Electrónica Accesorios Micro motoresTarjetas y Programadores
Ver todos Tarjetas y Programadores Tarjetas pcb Programadores-Adaptadores Tarjetas Plasticas
Categorías
Electrónica
keyboard_arrow_right
Instrumentos de medida
keyboard_arrow_right
Cámaras de vigilancia y seguridad CCTV
keyboard_arrow_right
Alarma Ajax
keyboard_arrow_right
Alarmas y seguridad
keyboard_arrow_right
Control de Accesos
keyboard_arrow_right
Espionaje y contraespionaje
keyboard_arrow_right
Termografía
keyboard_arrow_right
Kits y Módulos
keyboard_arrow_right
Ozonizadores
keyboard_arrow_right
Detectores de metales y oro
keyboard_arrow_right
Oportunidades
keyboard_arrow_right
Datos personales
- Mi cuenta
- Mis pedidos
- Direcciones
- Datos personales
- Contacto
Contacta con nosotros
Enviar un email
info@todoelectronica.com
Llámanos
949 20 10 23 / 91 233 60 27
Lun - Vie 8:00 a 16:00 horas
WhatsApp
Opiniones verificadas
4.9/5
De más de 657 opiniones.
Te atendemos
949 20 10 23 / 91 233 60 27
675924486
Blog de Electrónica
Categorías
Taller de electrónica: control de motores paso a paso
Proponemos un nuevo montaje de electrónica, esta vez se trata de un controlador para motores paso a paso. Un proyecto sencillo y muy práctico.
Jorge Pujol
Técnico electrónico
Experto en sistemas de control de acceso y presencia
Actualizado: 03/07/2023
2599

Compartir:
Los motores paso a paso son la mejor opción cuando se necesita mucha precisión.
Toca ponerse 'manos a la obra' e iniciar un nuevo proyecto de electrónica. Seguramente muchos de los que nos leéis habéis desmontado y reparado en alguna ocasión pequeños motores de corriente continua. Estos motores son muy comunes en multitud de aparatos electrónicos: montajes, juguetes, aparatos electrónicos… Aunque están muy bien, a veces son insuficientes. En estos casos utilizamos motores paso a paso, os contamos más sobre ellos y un montaje práctico para utilizarlos.
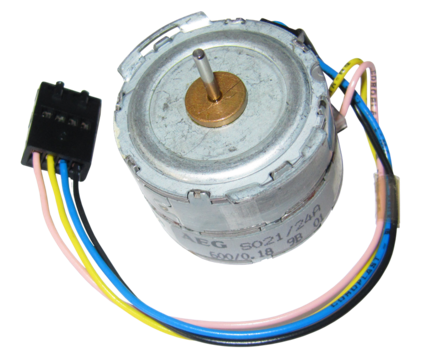
Motor paso a paso.
Los motores de corriente continua son fáciles de utilizar, solo hay que aplicar una corriente continua a sus dos patillas para que comiencen a girar. Tanto es así que se utilizan con frecuencia en todo tipo de proyectos de electrónica. El valor y sentido de esta corriente nos proporciona velocidades y sentidos de giro a nuestra voluntad, sin embargo, los motores de corriente continua presentan una serie de inconvenientes que los hace inútiles en algunas aplicaciones.
El mayor de estos problemas es su falta de precisión durante el arranque-parada. En aplicaciones donde la precisión del desplazamiento es muy elevada (impresoras, cabezales de discos duros, robótica…) su uso es imposible.
Para estas aplicaciones es necesario el uso de un tipo de motor de corriente continua un poco especial, conocido como motor paso a paso.
El motor paso a paso (abreviadamente PaP), es un motor que puede tener 4, 5 o 6 hilos, a los cuales tendremos que aplicar sucesivamente tensiones, para original el giro del rotor.
*Amplía aquí información sobre los motores paso a paso*.
En resumen, para hacer girar el motor, los impulsos (tensiones) han de ser aplicados secuencialmente primero a una bobina y después a la otra siguiendo el orden de las conexiones de cada una de ellas.
Como podéis ver, estos motores son muy prácticos para la realización de montajes donde sea necesaria una gran precisión, como puede ser un pequeño robot o en un posicionador de micro cámara. Además, los componentes se pueden encontrar en cualquier tienda de electrónica.
El mayor problema a la hora de poner en marcha un motor PaP es el diseño y construcción del controlador del motor. Este problema puede ser solucionado con el montaje que os explicamos a continuación.
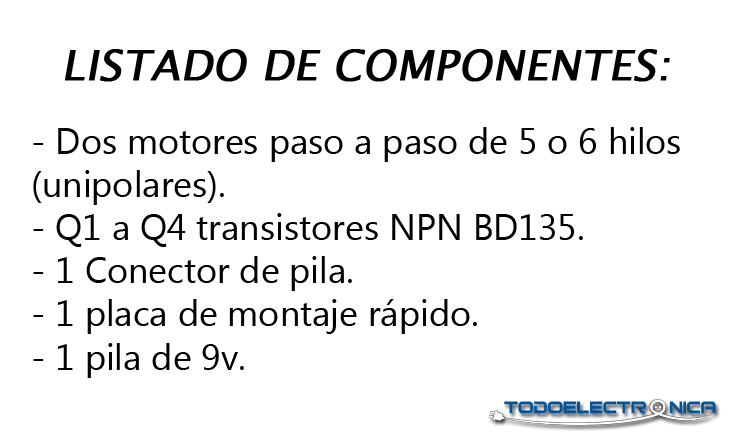
Listado de componentes necesarios para el montaje.
Funcionamiento de este proyecto de electrónica:
En la figura 1 podéis ver el esquema electrónico de este controlador. Como se puede apreciar el circuito que genera las señales de control no es ni más ni menos que otro motor PaP. No hay mejor generador de pulsos para un motor PaP que otro motor PaP.
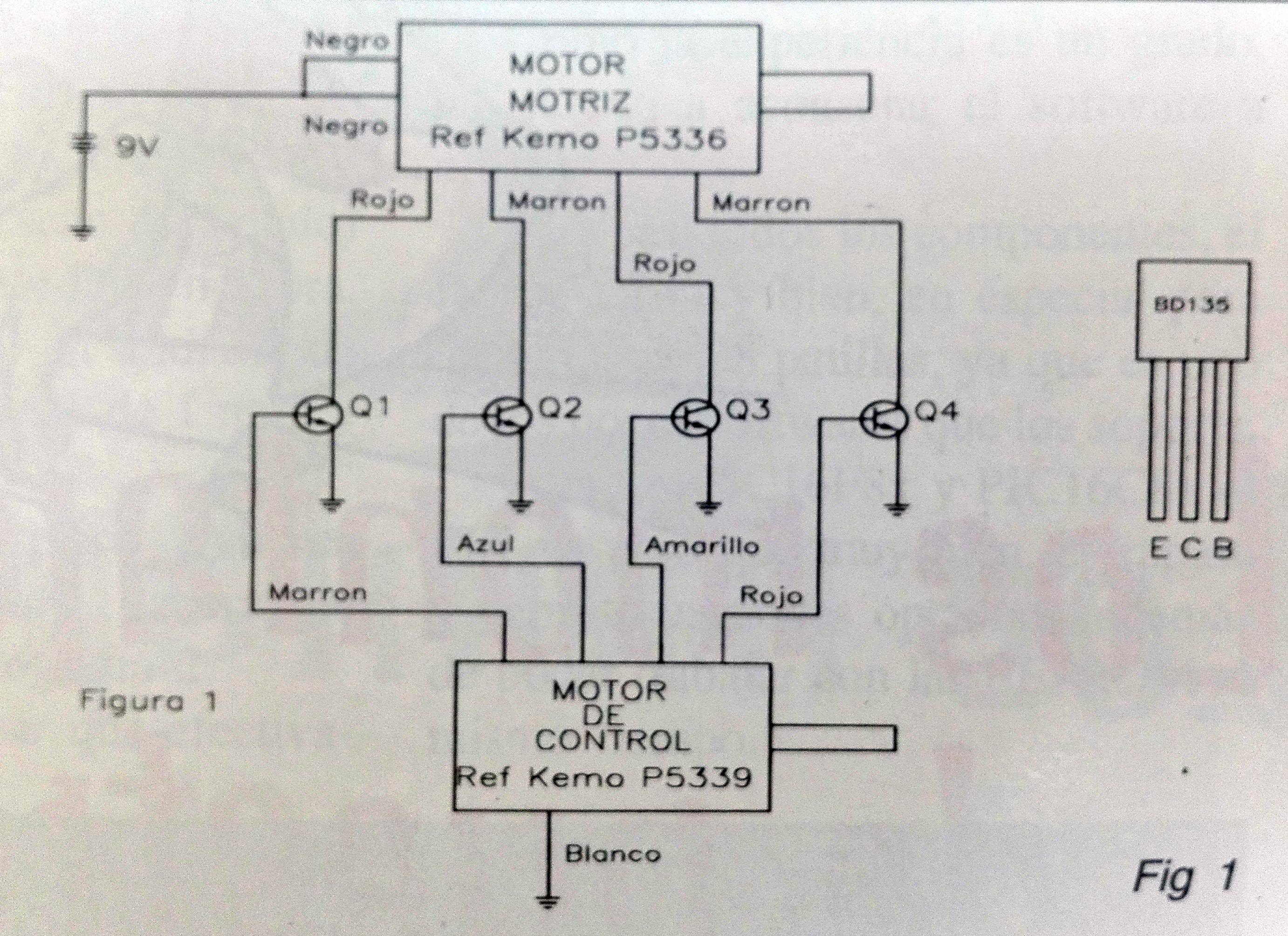
Figura 1. Esquema electrónico del control de motores paso a paso.
Estos motores paso a paso, al igual que otros de corriente continua, actúan como generadores cuando giramos el rotor con la mano.
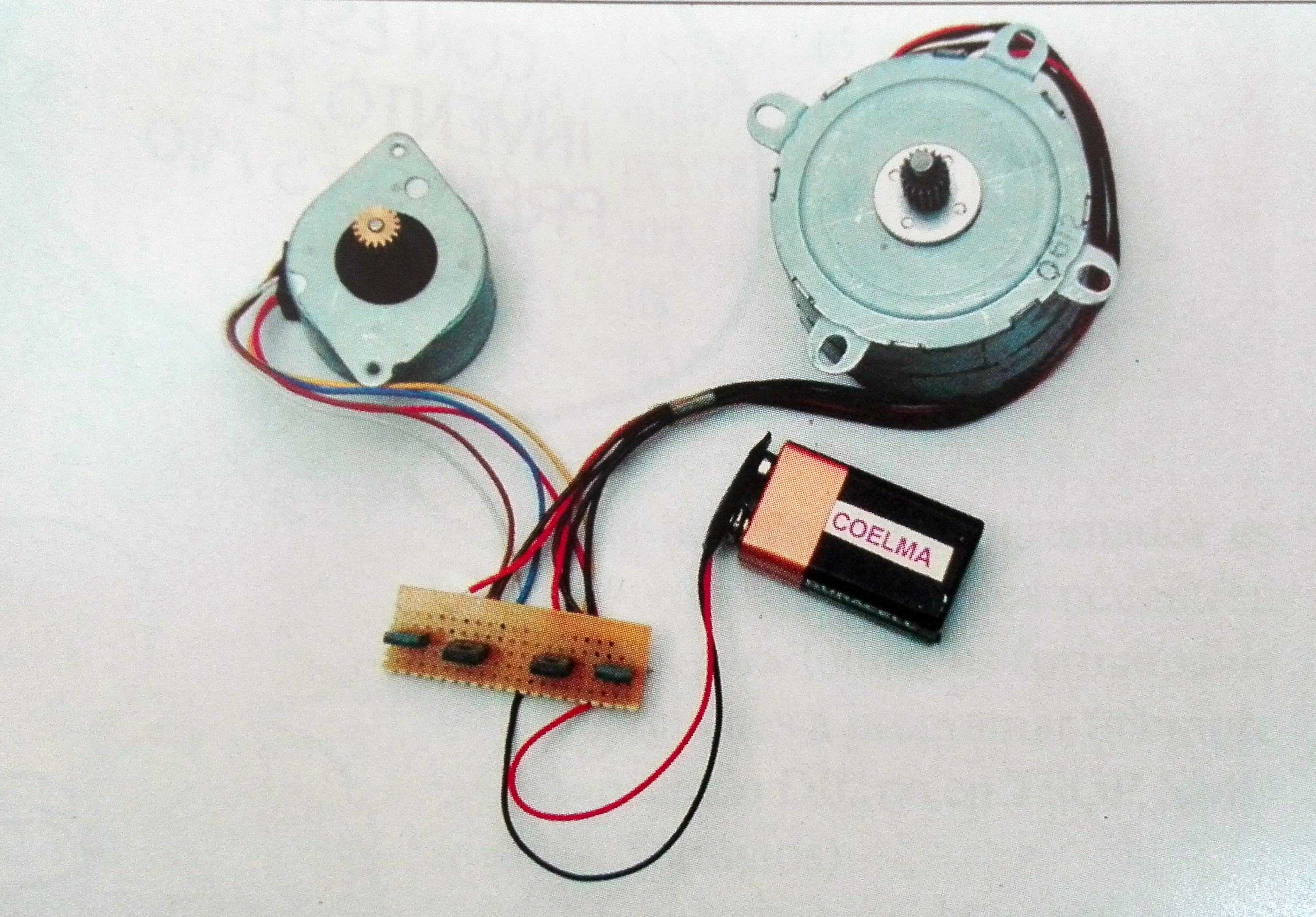
Si utilizamos un motor ‘grande’ como generador y uno pequeño como ‘actuador’, solo es necesaria la conexión entre sí de sus bobinas en el orden correcto.
En este caso hemos preferido hacer el proceso contrario. Es decir, por medio del presente circuito podremos mover un motor PaP de grandes dimensiones utilizando como generador otro motor de pequeño diámetro.
Naturalmente, para realizar esta operación es necesario amplificar los impulsos del motor que actúa como generador antes de aplicarlos al otro motor.
Para la amplificación solo son necesarios cuatro pequeños transistores del tipo NPN. Para que el motor pueda girar, las bobinas han de conectarse de manera correcta.
Aplicaciones:
- La mejor aplicación que podemos dar a nuestro controlador de motores es como ‘banco de pruebas’ para cualquier motor PaP.
- También puede ser utilizado como posicionador de cámara o para mover cualquier pequeño objeto, siempre que este no pese mucho.
- En robótica puede utilizarse para el movimiento de articulaciones, giro de ruedas, etc.
Tenemos que destacar que el consumo y disipación de potencia cuando no giramos el motor es de 0 mA, es decir consumo nulo.
Por medio de este montaje pueden experimentar de una manera sencilla y económica en el apasionante mundo de los motores paso a paso.
Si os ha resultado interesante esta práctica, recordad que tenéis muchas más en nuestras revistas Todoelectronica con kits para montar, o bien en el Curso de Electrónica para aprender todo lo necesario para realizar vuestros propios proyectos.
Más del autor
-

-

-
 Componentes Electrónicos ¿Cómo restaurar la contraseña de un grabador DVR Hikvision?Jorge Pujol 12044
Componentes Electrónicos ¿Cómo restaurar la contraseña de un grabador DVR Hikvision?Jorge Pujol 12044 -

-
 Electrónica La basura electrónica hecha arte: 5 ejemplos para quedarse con la boca abiertaJorge Pujol 7250
Electrónica La basura electrónica hecha arte: 5 ejemplos para quedarse con la boca abiertaJorge Pujol 7250 -

Posts más visto
-
1
Componentes Electrónicos Diodos Led: ¿Qué son y qué características tienen?
- 2
-
3
Componentes Electrónicos ¿Cómo restaurar la contraseña de un grabador DVR Hikvision?Jorge Pujol 12044
- 4
0 comentarios
Escribe un comentario